



Ходьба представляет собой универсальный способ передвижения, который обеспечивается работой опорно-двигательной системы (ОДС) и центральной нервной системы (ЦНС). Для реализации ходьбы обе системы имеют высокий уровень организации и развития. Ходьба — это автоматизированная локомоция, которая направлена на выполнение конкретной двигательной задачи. Локомоторный акт управляется из ЦНС центральной иннервационной программой. В основе ходьбы лежит деятельность спинального генератора шагательных движений в виде системы интернейронов и мотонейронов, а также мышц антагонистов с взаимными тормозными связями. Двуногая ходьба является координированным процессом. Согласованные движения отдельных частей тела требуют минимального управления, т.к. образуют синергии, которые облегчают движения. При синергии для осуществления ходьбы отсутствует необходимость в постоянном контроле ЦНС за мышечной активностью, за положением конечности и т.д. Ходьба является автоматизированным процессом, что позволяет расходовать энергию на оптимальном уровне. При нарушении автоматизма ходьбы происходит увеличение энергозатрат организма.

Структура ходьбы
Ходьба состоит из чередующихся между собой периодов опоры и переноса по воздуху. По отношению к времени двойного шага период переноса составляет 36%, а период опоры 64%. В состав периода опоры входят фаза опоры на пятку -7%, фаза опоры на всю стопу, или одноопорная фаза — 38%, фаза опоры на носок — 18%. Двухопорная фаза, при которой имеется опора на пятку одной ноги и носок другой ноги составляет 13%. Пропорциональное соотношение всех параметров во время ходьбы обеспечивает сохранение энергии при ее переходе из потенциальной в кинетическую путем поглощения ударных нагрузок, а также минимизации смещения общего центра масс (ОЦМ) и плавности ускорения движений.
Кинематические и динамические параметры ходьбы
У ходьбы имеются кинематические параметры: длина шага, ритм, скорость, продолжительность периода опоры, угол ротации таза, наклона таза, подгибания в коленном суставе, а также соотношение углов движения во всех суставах и т.д. Период, на протяжении которого одна из ног отталкивается от опоры, переносится по воздуху и приземляется на опору, пока друга нога находится на опоре, называется двойным шагом. У взрослого при ходьбе в произвольном темпе ритм ходьбы колеблется в пределах 92 - 98 шагов в минуту, средняя скорость ходьбы составляет 1,1 – 1,2 м/сек. Длина двойного шага составляет 1,4 метра. При скорости движения 1,04 м/сек длина двойного шага составляет 76% роста тела.

Рис. 2. Периоды и фазы ходьбы.
1. Двухопорная фаза.
2. Одноопорный период на всю стопу.
3. Фаза заднего толчка, отталкивание носком.
4. Период переноса ноги по воздуху.
5. Фаза переднего толчка, приземление на пятку.
Основной динамической характеристикой ходьбы является реакция опоры. Это сила, с которой во время ходьбы нога приземляется на опору и отталкивается от нее. Реакция опоры состоит из вертикального, продольного и поперечного компонентов, которые действуют в соответствующих направлениях. График реакции опоры имеет вид двугорбой кривой, в которой первый подъем соответствует переднему толчку, а второй подъем соответсвует заднему толчку.
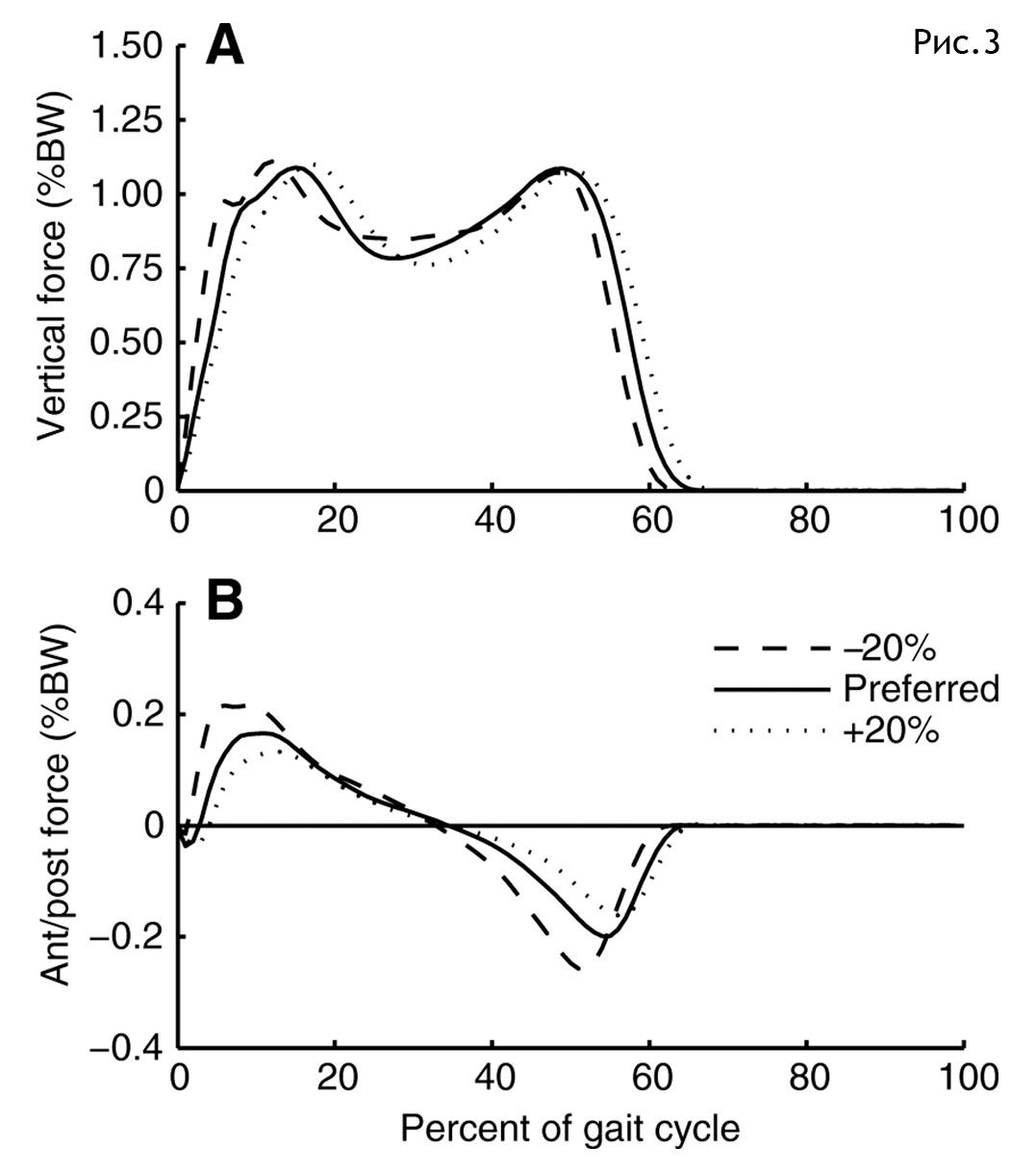 Рис. 3. График реакции опоры при ходьбе.
Рис. 3. График реакции опоры при ходьбе.
А. Вертикальный компонент реакции.
В. Продольный компонент реакции.
Передний толчок происходит в фазу опоры на пятку. Задний толчок происходит в фазу опоры на носок. В фазу опоры на всю стопу происходит вначале уменьшение переднего толчка, а затем нарастание заднего толчка. Величина толчков превосходит вес тела. Во время ходьбы реакция опоры начинается с фазы переднего толчка, когда стопа касается пяткой опорной поверхности. Возникает несколько моментов сил, которые обусловлены точкой приложения реакции опоры. В сагиттальной плоскости область контакта пятки с опорой расположена в проксимальной части пяточной области. Вектор реакции опоры проходит позади осей коленного и голеностопного суставов, что способствует сгибанию в коленном суставе. Стопа находится под действием двух моментов. Наружный сгибательный момент вызван действием веса переднего отдела стопы. Он преобладает над внутренним моментом, который обусловлен эксцентрическим сокращением передней большеберцовой мышцы с целью торможения подошвенного сгибания. По мере установки стопы на опоре происходит сгибание пяточной кости. Она тянет за собой вниз таранную кость, которая ротируется во внутрь и увлекает за собой большеберцовую кость. Начинается внутренняя ротация голени. Во фронтальной плоскости точка контакта пятки с опорой расположена латеральней оси голени и подтаранного сустава, что вызывает наружный эверсионный момент в подтаранном суставе. Происходит эверсия пятки, которая занимает от 8 до 15% периода опоры. При эверсии пяточной кости оси таранно-ладьевидного и пяточно-кубовидного суставов стоят параллельно, что способствует низкой жесткости средне-плюсневого сустава, амортизации переднего толчка, уменьшению ударной и торсионной силы, которая действует на голеностопный сустав и голень. В фазу переднего толчка имеется увеличение активности малоберцовой мышцы, которая пронирует стопу, обеспечивает прилегание к опоре медиального края стопы, что повышает устойчивость тела. Малоберцовая мышца преодолевает тягу задней большеберцовой мышцы, которая работает в эксцентрическом режиме и удерживает стопу от резкого опускания. Фаза переднего толчка занимает 7% времени двойного шага. Во время переднего толчка идет сгибание коленного сустава, амплитуда которой достигает 10°. Благодаря движениям в средне-плюсневом, подтаранном и коленном суставах происходит амортизация реакции опоры, которая не передается на туловище.
Наступает фаза опоры на всю стопу, во время которой происходит прислоение к опоре всей подошвенной поверхностью стопы. В фазу опоры на всю стопу большеберцовая кость совершает движение в двух плоскостях. В горизонтальной плоскости большеберцовая кость продолжает ротацию во внутрь. В сагиттальной плоскости большеберцовая кость, как часть обратного маятника, совершает ротацию на блоке таранной кости в направлении сзади наперед. Происходит разгибание голени в голеностопном суставе. Наружный разгибательный момент, который обусловлен действием веса тела, перенесенным на ногу, преобладает над внутренним сгибательным моментом, обусловленным эксцентрическим сокращением трехглавой мышцы, которая препятствует разгибанию в голеностопном суставе. В фазу опоры на всю стопу реакция опоры претерпевает уменьшение. Под действием наружного момента происходит опускание свода стопы до минимума за весь период опоры. Наружный момент преобладает над внутренним моментом, который обусловлен действием задней большеберцовой мышцы, препятствующей опусканию свода. Эксцентрическая активность задней большеберцовой мышцы нарастает по мере увеличения нагрузки на стопу. За счет работы малоберцовой мышцы происходит пронация и отведение стопы в переднем отделе. Момент отведения, создаваемый малоберцовой мышцей преобладает над моментом приведения, создаваемый задней большеберцовой мышцей. Отведение переднего отдела стопы способствует понижению ее свода. Фаза стояния на всей стопе переходит в фазу заднего толчка, когда угол наклона голени вперед колеблется в пределах 15° - 20°. В фазу заднего толчка движению тела сообщается импульс, который посылает тело вперед. Задний толчок начинается с отрыва пятки от опоры. Перед отрывом пятки происходит окончание пронации стопы и начало супинации. После отрыва пятки равнодействующая реакции опоры проходит впереди от коленного сустава, что создает разгибательный момент, который способствует разгибанию колена и уменьшению нагрузки на мышцы разгибатели голени. В голеностопном суставе на смену разгибания приходит сгибание. Внутренний сгибательный момент в голеностопном суставе, вызванный концентрическим сокращением задней группы мышц голени преобладает над наружным моментом, вызванным действием веса тела. Благодаря содружественному сокращению трехглавой, малоберцовой и задней большеберцовой мышц происходит резкое нарастание реакции опоры. Трехглавая мышца производит сгибание стопы, в результате чего осуществляется отталкивание от опоры. Высокая активность трехглавой мышцы сохраняется на протяжении всего заднего толчка. Напряжение малоберцовой мышцы способствует стабилизации 1 плюсне-фалангового сустава и пяточно-кубовидного сустава. Задняя большеберцовая мышца осуществляет инверсию стопы, наружную ротацию большеберцовой кости и приведение переднего отдела стопы. При инверсии оси таранно-ладьевидного и пяточно-кубовидного суставов утрачивают свое параллельное положение и устанавливаются под углом друг к другу вплоть до прямого, что увеличивает жесткость средне-тарзального сочленения. Приведение стопы в средне-тарзальном суставе сопровождается увеличением ее свода. Момент ротации большеберцовой кости наружу, обусловленный тягой задней большеберцовой мышцы, преобладает над моментом внутренней ротации, обусловленный тягой малоберцовой мышцы. В фазу заднего толчка задняя большеберцовая мышца и малоберцовая мышца действуют одновременно, что приводит к увеличению жесткости переднего отдела стопы. Происходит улучшение рычажных свойств переднего отдела стопы во время отталкивания от опоры, что облегчает работу трехглавой мышцы. Передняя группа мышц остается неактивной.
После отрыва пятки от опоры начинается разгибание в плюсне-фаланговых суставах, амплитуда которой, при ходьбе босиком, достигает 60°. Движение в плюсне-фаланговых суставах оказывает влияние на качество переката стопы. Последовательный процесс переката вначале через головки плюсневых костей, затем через пальцы приводит к постепенному увеличению рычага отталкивания на 1/3, что обеспечивает плавность ускорения движения тела. При отталкивании от опоры задний отдел стопы оказывается под действием двух разнонаправленных сил: натяжения ахиллова сухожилия, которое осуществляет тракцию пяточной кости кверху и натяжения подошвенного апоневроза. При разгибании пальцев на угол более 30°, возникает результирующая сила, которая прижимает пяточную кость к костям среднего отдела стопы и стабилизирует задний отдел стопы. Разгибание в плюсне-фалагновых суставах сменяется на их сгибание. Увеличение длины стопы на длину пальцев увеличивает рычаг отталкивания. Под действием мышц сгибателей пальцев и большого пальца происходит отталкивание пальцами от опоры. Во время опоры на пальцы вектор реакции опоры смещается кзади от коленного сустава, что вызывает в нем образование сгибательного момента. Сгибание колена облегчает перенос ноги по воздуху в последующий период ходьбы.
 Рис. 4. Увеличение рычага отталкивания стопы при сокращении трехглавой мышцы голени во время заднего толчка.
Рис. 4. Увеличение рычага отталкивания стопы при сокращении трехглавой мышцы голени во время заднего толчка.
Участие в опоре отдельных пальцев зависит от выбора одной из осей, которые используются при перекате через передний отдел стопы. На уровне плюсне-фаланговых суставов 2 плюсневая кость является наиболее выступающей в дистальном направлении, что приводит к образованию двух осей переката, в результате чего в переднем отделе образуется поперечная ось через головки 1 и 2 плюсневых костей и косая ось через головки 2 и 5 плюсневых костей. Плечо рычага при перекате через поперечную ось на 1/5 больше, чем при перекате через косую ось. Относительно большая длина рычага компенсируется участием в отталкивании большого пальца, сила которого превышает силу остальных пальцев в 2 раза. Наличие двух осей переката позволяет разнообразить процесс ходьбы, осуществить отталкивание в соответствии с колебаниями туловища и обеспечить эффективность передвижения по неровной поверхности. Перекат стопы оканчивается после отрыва пальцев от опоры. Продолжительность фазы опоры на носок составляет 18% времени двойного шага.
После периода опоры наступает период переноса ноги по воздуху, который облегчен благодаря сгибанию голени в коленном суставе. В начале периода переноса стопа остается согнутой в голеностопном суставе, после чего наступает ее разгибание под действием концентрического сокращения передней большеберцовой мышцы. Разгибание продолжается до следующего контакта стопы с опорой и достигает максимума перед передним толчком. Разгибание стопы облегчает перенос ноги над поверхностью опоры. При разгибании стопы имеется ее эверсия в подтаранном суставе. Продолжительность периода переноса ноги по воздуху составляет 34% времени двойного шага.
При нормальной ходьбе все мышечные силы сбалансированы. Недостаточность каждой из мышц приводит к мышечному дисбалансу и вызывает нарушение ходьбы. При недостаточности задней большеберцовой мышцы наступает преобладание мышц эверторов, действие которых проявляется в зависимости от фаз переката. В фазе переднего толчка и фазе опоры на всю стопу преобладающая тяга малоберцовых мышц приводит к быстрому наступлению эверсии, которая сопровождается отведением в средне-тарзальном суставе. В фазу заднего толчка преобладающая тяга малоберцовых мышц лишает свод стопы необходимой жесткости. Во время отталкивания от опоры происходит эверсия пятки, отведение переднего отдела стопы, уплощение ее свода и растяжение прыжковой связки. При недостаточности малоберцовой мышцы доминирует тяга задней большеберцовой мышцы. Во время ходьбы наступает уменьшение эверсии и преобладание инверсии, что приводит к растяжению латеральных связок голеностопного сустава. При недостаточности малоберцовой мышцы в фазе заднего толчка отсутствует стабилизация 1 плюсневой кости, что приводит к снижению опороспособности медиального края стопы. При недостаточности трехглавой мышцы происходит ослабление отталкивания от опоры, что не поддается компенсации со стороны других мышечных групп голени и частично восполняется работой четырехглавой мышцы бедра. Во время отталкивания от опоры имеет место недостаточная стабилизация заднего отдела стопы и неполное ограничение наружной ротации голени на фиксированной стопе, что частично компенсируется напряжением задней большеберцовой и малоберцовой мышц.
Обратный маятник
 Во время ходьбы под действием силы веса и реакции опоры происходит последовательное чередование подъемов и падений тела над поверхностью опоры, когда все тело и отдельные его сегменты совершают маятникообразные движения. Все тело представляет собой обратный маятник, точкой опоры которого служит стопа. Общий центр масс тела у взрослого расположен выше опоры на уровне второго поясничного позвонка L2. При ходьбе тело, подобно маятнику, производит колебательные движения над точкой опоры за счет отталкивания от опоры. Опорная нога, туловище и голова образуют обратный маятник, а переносимая нога работает, как прямой маятник. При ходьбе после отталкивания от опоры маятник выходит из состояния неустойчивого равновесия и начинает падать вперед. Маятник совершает наклон в голеностопном суставе над стопой, которая фиксирована на опоре. По мере увеличения угла наклона тела происходит ускорение свободного падения и увеличение кинетической энергии тела. Падение маятника прекращается в результате изменения положения ног. Во время падения тела одна из ног остается фиксированной на опоре, а другая нога, сгибается в тазобедренном суставе и выносится вперед по типу прямого маятника. Вынос бедра вперед облегчен благодаря наклону вперед всего тела. Во время выноса бедра происходит разгибание голени в коленном суставе и ее вынос также по типу прямого маятника. Вынесенная нога совершает процесс переноса по воздуху и упирается на опору впереди тела, в результате чего происходит прекращение падения маятника и восстановление вертикального положения тела. Опорная нога, которая осталась позади тела, совершает отталкивание от опоры и дальнейший перенос по воздуху как прямой маятник. Маятникообразные движения тела вызывают изменение положения ОЦМ. Наклон тела вперед приводит к понижению ОЦМ, а отталкивание от опоры вызывает его подъем. За время двойного шага опускание и подъем ОЦМ происходит дважды. Самое высокое положение ОЦМ достигает в фазу двойной опоры, когда одна нога опирается на пятку, а другая нога — на носок. За счет повторяемости и устойчивости движений маятниковый механизм дает организму существенную энергетическую выгоду. Повторяемость движений уменьшает затраты энергии при локомоции. Маятниковый механизм является энергосберегающим видом передвижения, что влияет на все параметры ходьбы. Устойчивость движений обеспечивает постоянство воспроизведения циклов движения и снижает необходимость в их активном управлении. Низкие затраты энергии и легкость управления являются факторами оптимизации локомоции.
Во время ходьбы под действием силы веса и реакции опоры происходит последовательное чередование подъемов и падений тела над поверхностью опоры, когда все тело и отдельные его сегменты совершают маятникообразные движения. Все тело представляет собой обратный маятник, точкой опоры которого служит стопа. Общий центр масс тела у взрослого расположен выше опоры на уровне второго поясничного позвонка L2. При ходьбе тело, подобно маятнику, производит колебательные движения над точкой опоры за счет отталкивания от опоры. Опорная нога, туловище и голова образуют обратный маятник, а переносимая нога работает, как прямой маятник. При ходьбе после отталкивания от опоры маятник выходит из состояния неустойчивого равновесия и начинает падать вперед. Маятник совершает наклон в голеностопном суставе над стопой, которая фиксирована на опоре. По мере увеличения угла наклона тела происходит ускорение свободного падения и увеличение кинетической энергии тела. Падение маятника прекращается в результате изменения положения ног. Во время падения тела одна из ног остается фиксированной на опоре, а другая нога, сгибается в тазобедренном суставе и выносится вперед по типу прямого маятника. Вынос бедра вперед облегчен благодаря наклону вперед всего тела. Во время выноса бедра происходит разгибание голени в коленном суставе и ее вынос также по типу прямого маятника. Вынесенная нога совершает процесс переноса по воздуху и упирается на опору впереди тела, в результате чего происходит прекращение падения маятника и восстановление вертикального положения тела. Опорная нога, которая осталась позади тела, совершает отталкивание от опоры и дальнейший перенос по воздуху как прямой маятник. Маятникообразные движения тела вызывают изменение положения ОЦМ. Наклон тела вперед приводит к понижению ОЦМ, а отталкивание от опоры вызывает его подъем. За время двойного шага опускание и подъем ОЦМ происходит дважды. Самое высокое положение ОЦМ достигает в фазу двойной опоры, когда одна нога опирается на пятку, а другая нога — на носок. За счет повторяемости и устойчивости движений маятниковый механизм дает организму существенную энергетическую выгоду. Повторяемость движений уменьшает затраты энергии при локомоции. Маятниковый механизм является энергосберегающим видом передвижения, что влияет на все параметры ходьбы. Устойчивость движений обеспечивает постоянство воспроизведения циклов движения и снижает необходимость в их активном управлении. Низкие затраты энергии и легкость управления являются факторами оптимизации локомоции.
Рис. 5. Модель обратного маятника в ходьбе
Резонанс
Дa href="https://www.persey-orto.ru/images/articles/walking_6.jpg">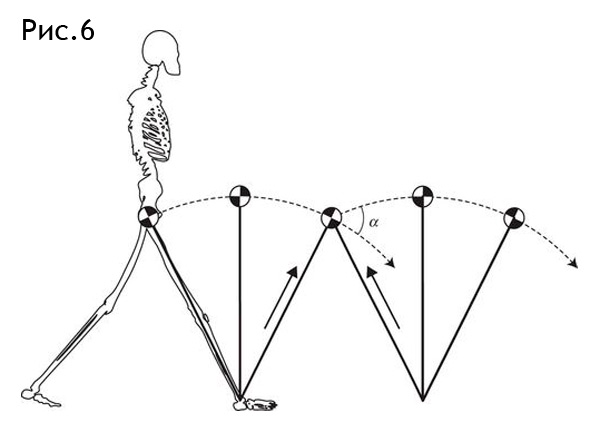 Для всей ОДС и для нижней конечности характерны колебания, которые обладают собственной частотой. При ходьбе в конечностях возникают вынужденные колебания. Система управления движением использует колебательные свойства нижних конечностей и, связанное с колебаниями, явление резонанса. Резонанс представляет собой возрастание амплитуды вынужденных колебаний, которое наступает при приближении частоты внешнего воздействия к собственным резонансным частотам ОДС. Существует определенная частота вынуждающей силы, при которой колебания ОДС оказываются отзывчивыми на действия этой силы. Для того, чтобы собственная частота конечности совпала с частотой вынужденных колебаний, система управления движением изменяет моменты инерции в суставах ноги. Резонанс позволяет осуществлять концентрацию мышечной активности для выполнения ходьбы, а также минимизировать затраты энергии на ходьбу. Изменение скорости движения вызывает изменение частоты колебаний конечности, которая подстраивается под частоту сокращающихся мышц путем изменения углов движения в суставах ноги. Координация сгибания и разгибания в тазобедренном, коленном и голеностопном суставах приводит к уменьшению энергозатрат. Оптимум мышечного резонанса и передачи энергии наблюдается при скорости ходьбы 1,4 м/сек.
Для всей ОДС и для нижней конечности характерны колебания, которые обладают собственной частотой. При ходьбе в конечностях возникают вынужденные колебания. Система управления движением использует колебательные свойства нижних конечностей и, связанное с колебаниями, явление резонанса. Резонанс представляет собой возрастание амплитуды вынужденных колебаний, которое наступает при приближении частоты внешнего воздействия к собственным резонансным частотам ОДС. Существует определенная частота вынуждающей силы, при которой колебания ОДС оказываются отзывчивыми на действия этой силы. Для того, чтобы собственная частота конечности совпала с частотой вынужденных колебаний, система управления движением изменяет моменты инерции в суставах ноги. Резонанс позволяет осуществлять концентрацию мышечной активности для выполнения ходьбы, а также минимизировать затраты энергии на ходьбу. Изменение скорости движения вызывает изменение частоты колебаний конечности, которая подстраивается под частоту сокращающихся мышц путем изменения углов движения в суставах ноги. Координация сгибания и разгибания в тазобедренном, коленном и голеностопном суставах приводит к уменьшению энергозатрат. Оптимум мышечного резонанса и передачи энергии наблюдается при скорости ходьбы 1,4 м/сек.
Рис. 6. Резонанс в ходьбе
У человека ходьба ассоциируется с обувью. Обувь должна быть такой, чтобы облегчать локомоцию, сделать ее удобной и комфортной, обеспечить надежность опоры и способствовать маятникообразному движению с резонансом, которые заложены природой. Для ходьбы компания Персей предлагает широкий выбор обуви.




Рис.7. Модели обуви Персей для повседневной носки
{kind=link}